
Biography
I am a 4th year undergraduate at Oregon State University majoring in Computer Science. I currently do research at the Dynamic Robotics Lab on developing reinforcement learning algorithms to control legged robots. My research interests lie in the intersection of deep reinforcement learning with humanoid robotics and control. I believe in open, reproducible research and most of my code can be found freely on my github, @p-morais.
When I'm not making robots walk and run I'm probably cooking, hiking, or watching B movies with my 4 month old kitten, Mongy.
[
Resume
]
Timeline
Academic Publications
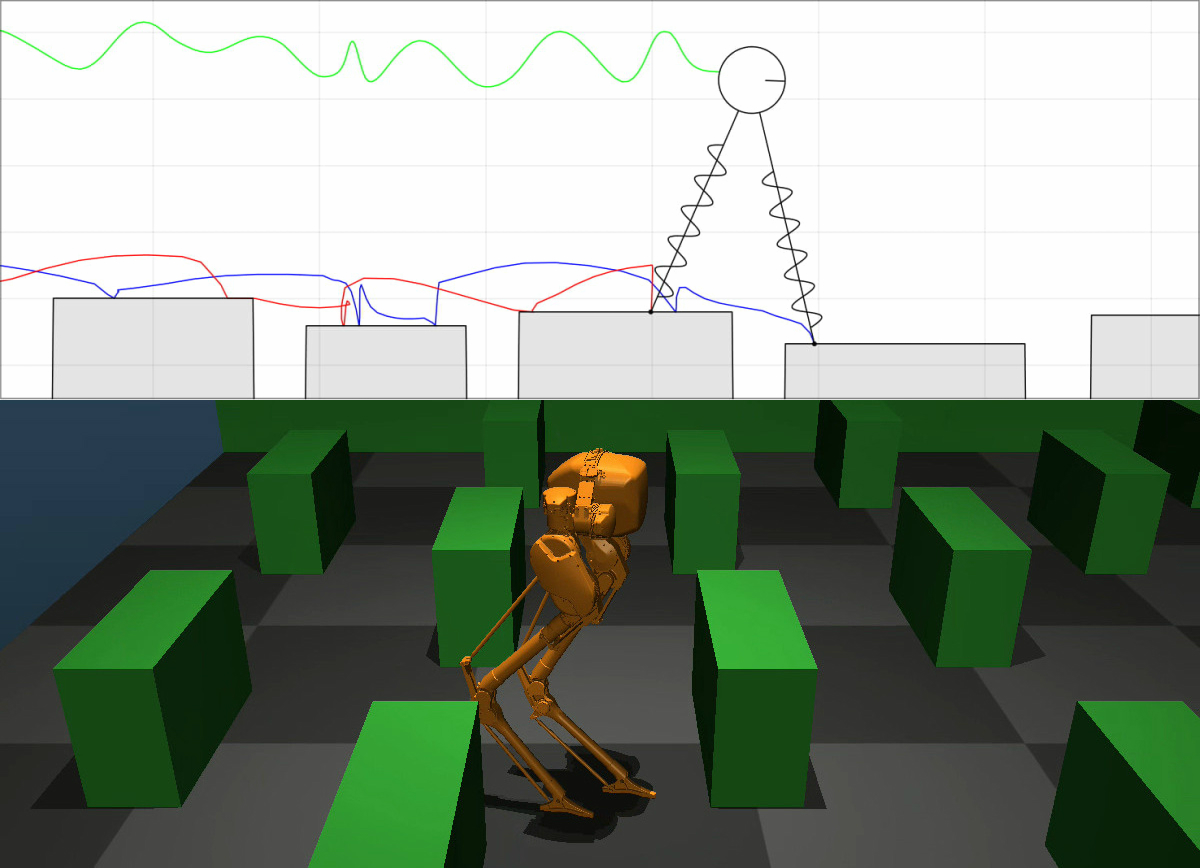
In this paper, we take a step towards high-level task planning for agile biped robots by studying a planar simulated biped that captures their essential dynamics. We investigate variants of Monte-Carlo Tree Search (MCTS) for selecting an appropriate blind-walking controller at each decision epoch. In particular, we consider UCT with an intelligently selected rollout policy, which is shown to be capable of guiding the biped through treacherous terrain. In addition, we develop a new MCTS variant, called Monte-Carlo Discrepancy Search (MCDS), which is shown to make more effective use of limited planning time than UCT for this domain.
Personal Projects
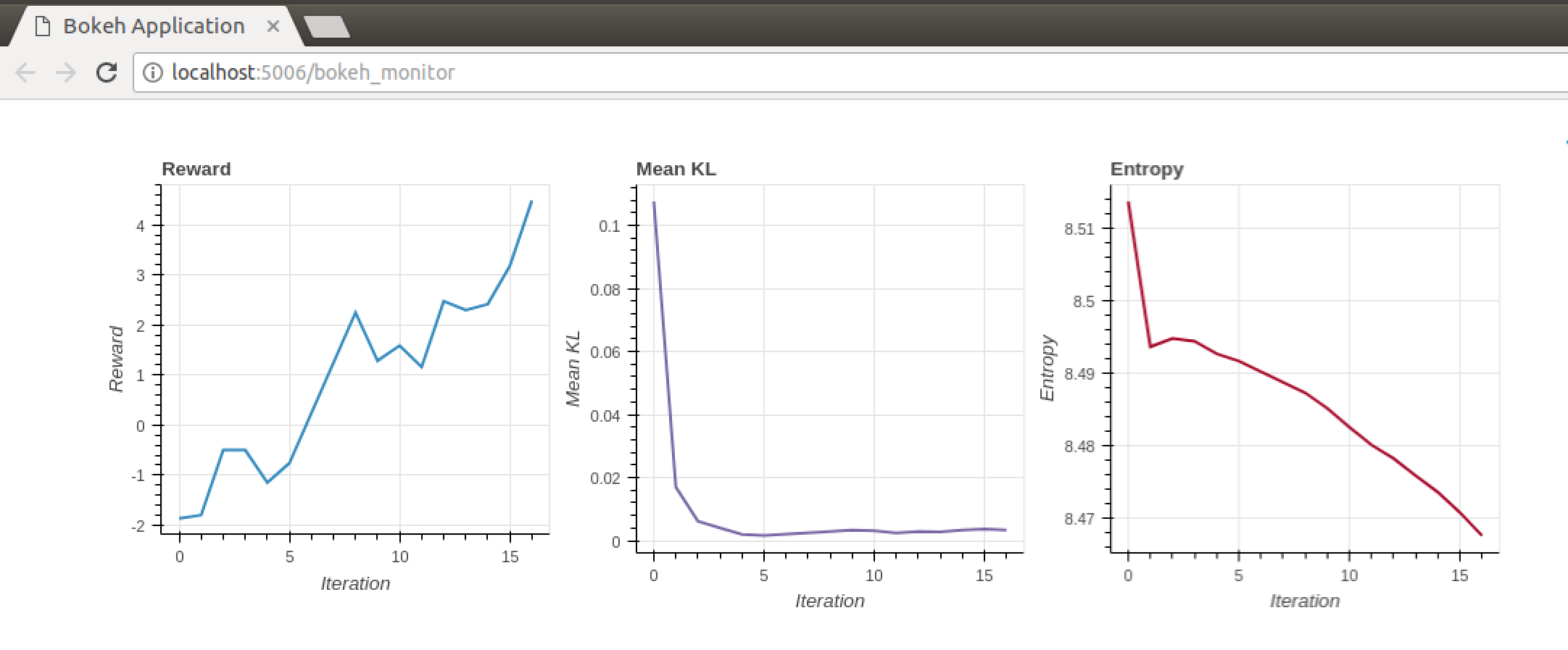
A python library that contains modular implementations of continuous deep reinforcement learning algorithms in Pytorch. Includes recent advances like Proximal Policy Optimization and Generalized Advantage Estimation as well as features like real-time graphs and advanced logging.
A web-app that uses machine learning (mainly supervised learning via xgboost) to predict the odds of a basketball player succesfully scoring under specific conditions (matchup, shot type, distance and location etc) as well as providing descriptive statistics about scoring patterns. Submitted to Quackcon (an MLH Season 17 event) where it made the Final 6 and received the award for Best Athletic Enhancement Product.
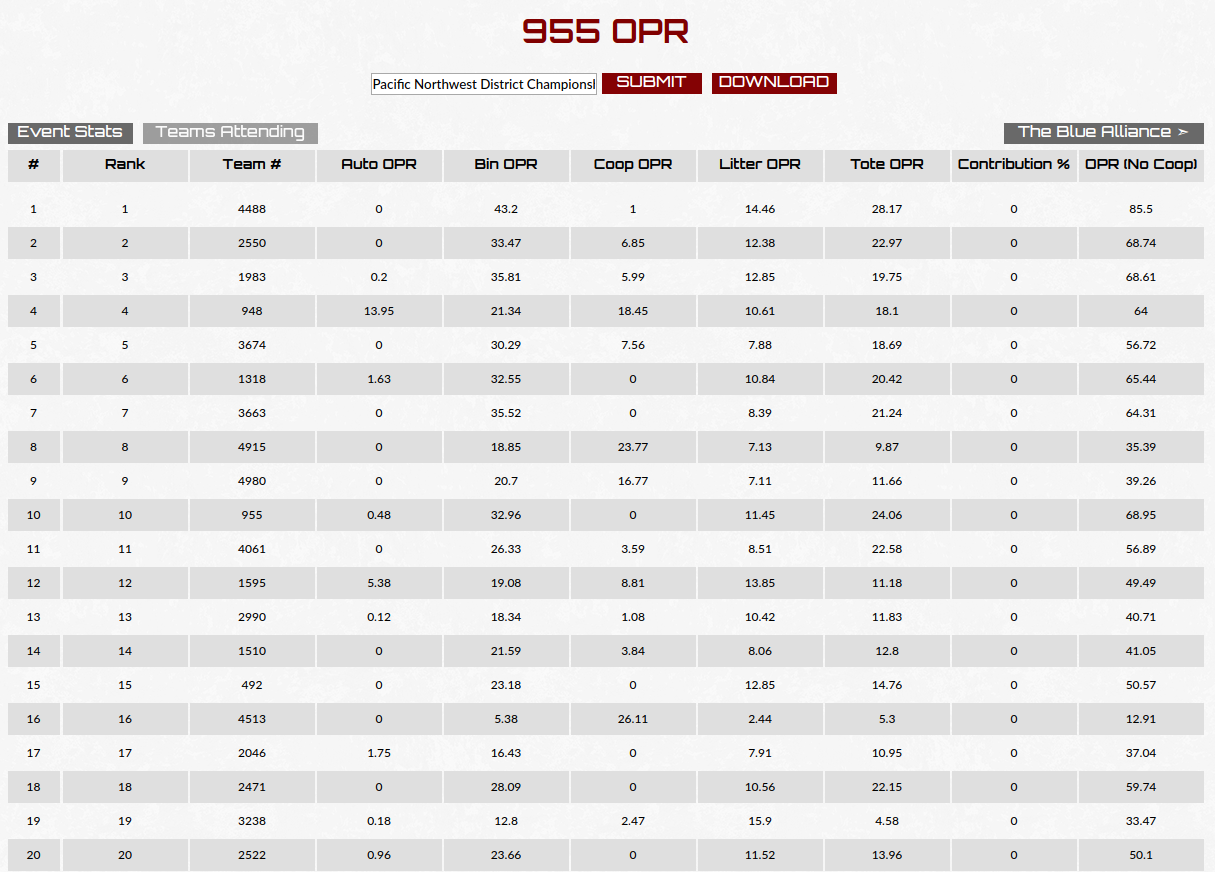
A comprehensive tool for FIRST Robotics teams to analyze competition data and make evaluations about robot performance for competitive analysis. Our program was used around the world by teams from Oregon to Israel in 2015. The program sifts through match scores compiled through thebluealliance.com's API and scraped from Twitter and solves an overdetermined system of equations via ordinary least squares to fit a linear model of match outcomes. It features a slick custom GUI made in HTML5 and JQuery with a number of usability and querying features to maximize usability.